ひたちBRTの取り組み
6. 自律システム
6.1 車両開発
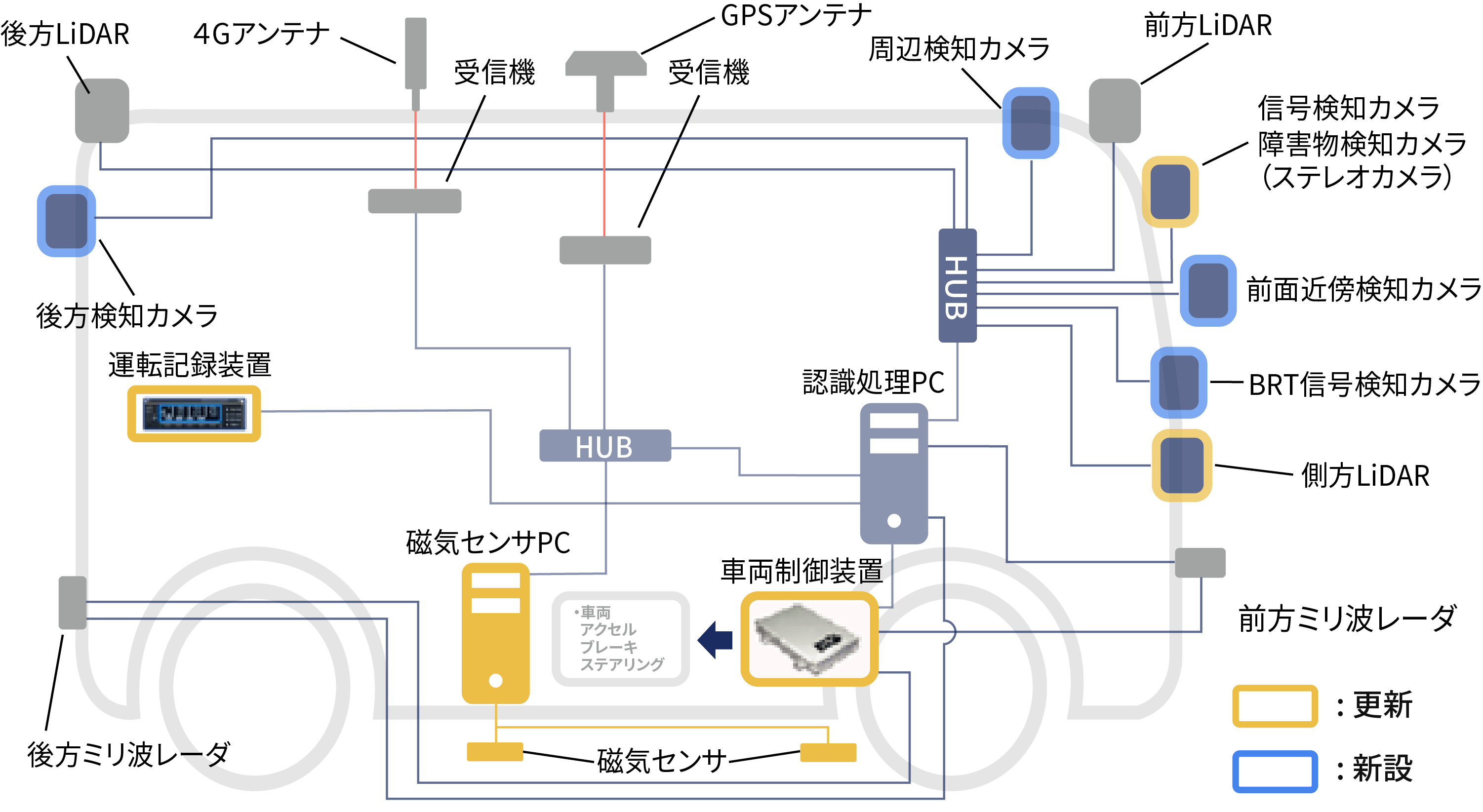
2022年度実証実験に向けた車両開発において、ひたちBRTでの自動運転(運転席無人)を想定した改造を実施
過年度の実証結果を踏まえ、「障害物検知機能や信号灯色情報の検知精度向上」及び「車両近傍の障害物の確実な検知」を達成するため、「信号認識カメラ」、「側方LiDAR」を更新するとともに、新たにBRT信号検知カメラ、周辺検知カメラ、後方検知カメラを追加
機能追加に対応すべく、処理演算器も更新
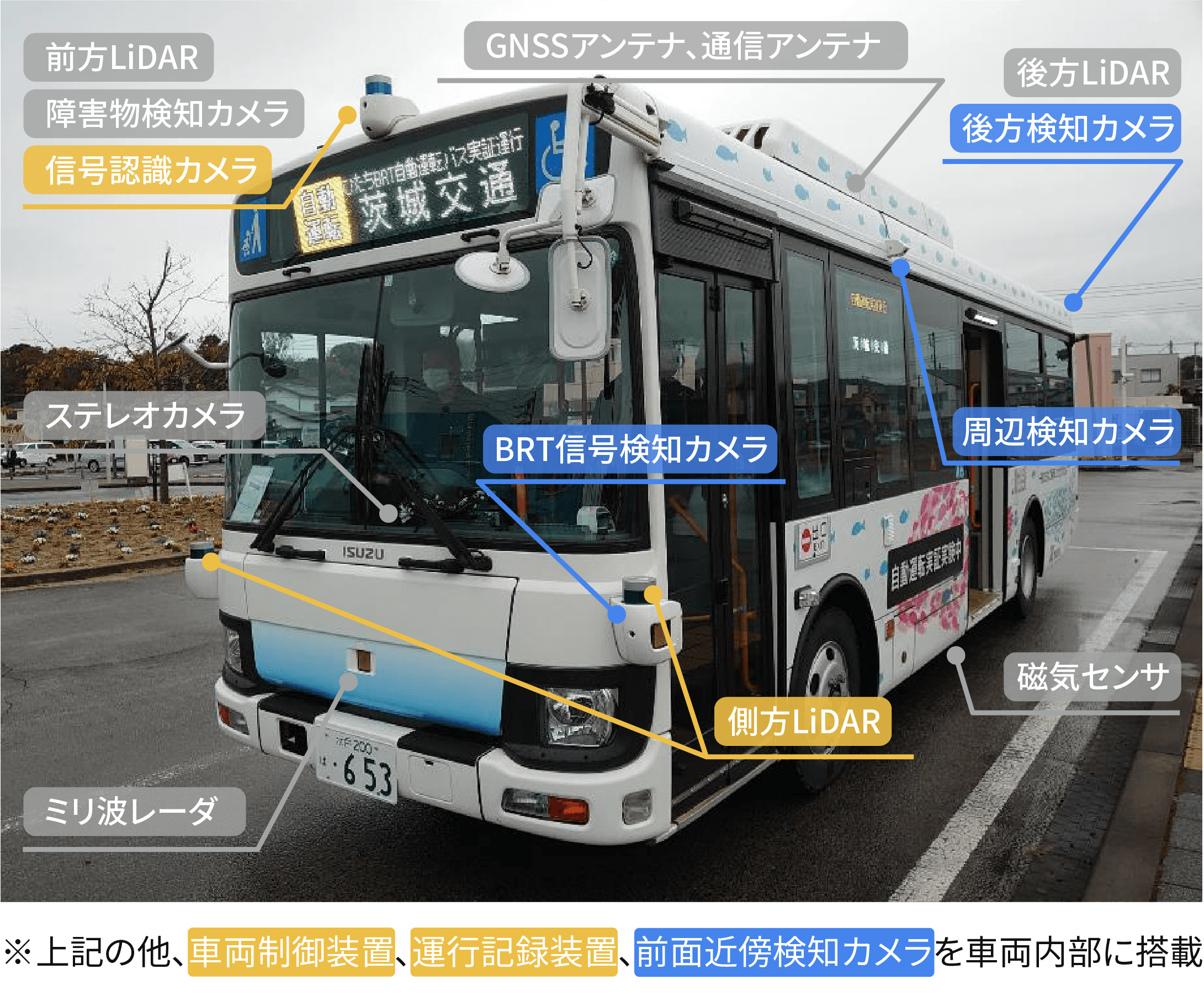
: 2020年度実験使用車両から更新した装置
: 2020年度実験使用車両から追加した装置